Je vais utiliser ici le protocole http://www.astrosurf.com/buil/5d/test.htm avec les corrections apportées par le post http://www.astrosurf.com/astropratique/031290.html.
Mesure du Gain:
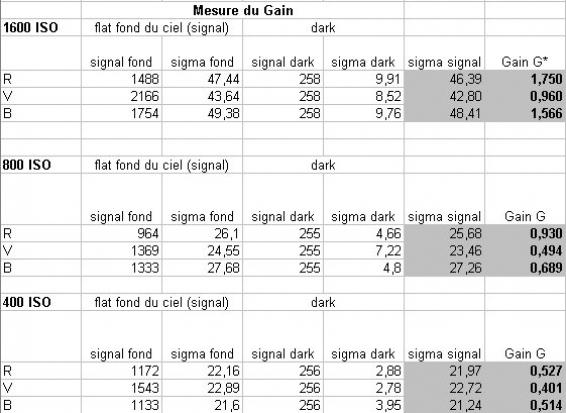
Pour chaque sensibilité de 400 à 1600 ISO) je prends une photo du fond du ciel (signal) ainsi qu'un dark. Sous iris pour le fond du ciel on sépare les plans couleur et pour chaque plan couleur on sélectionne une zone assez large uniforme pour relèver la statistique: signalfond et
sigmafond pour le fond du ciel. On fait de même sur le dark (même temps de pose dans le noir) on relève donc et signaldark et sigmadark que l'on nome aussi sigma de lecture ou bruit de lecture.
Pour séparer les plans faire une Photonumérique/décodage de fichier Raw puis séparation rgb.
sigmasignal=(sigmafond2 - sigmadark2)1/2 (le bruit sur le fond est la somme quadratique des bruits de lecture et du bruit sur le signal)
G= sigmasignal/(signalfond-signaldark)
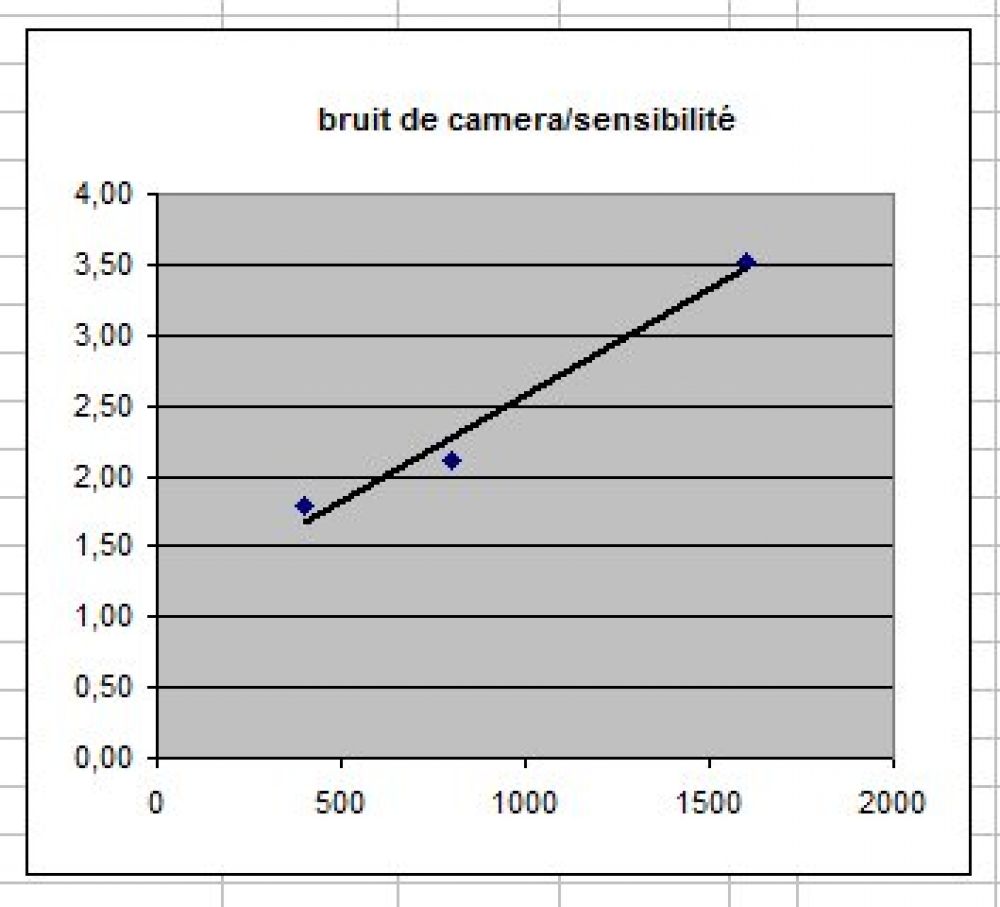
voir l'image (1) pour les résultats sur le gain.
Bruit de lecture
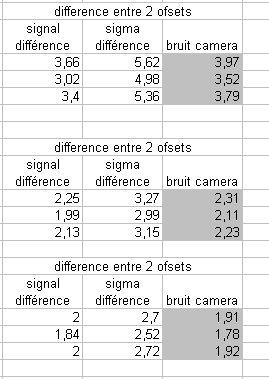
Sur la base de deux pose d'offset (1/4000e) dans le noir), on calcule la différence des deux images et on évalue l'écart type de cette différence dans une zone de 200 à 300 pixels de coté environ. Le bruit (camera) est l'écart type trouvé, divisé par la racine de deux (1,414), car la différence fait intervenir deux images et l'on additionne alors les bruits quadratiquement. Voir l'image 2 pour les résultats.
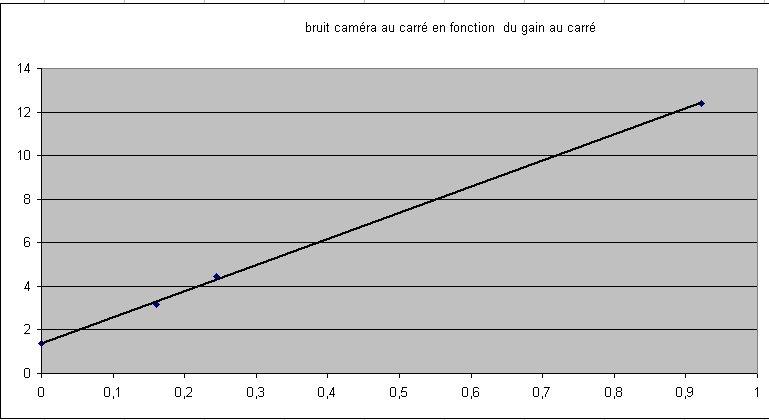
Ce bruit de caméra et la somme quadratique d'une bruit électronique indépendant du gain (bruit de talon) et d'un bruit dépendant du gain: sigmacamera2=(G*sigmalecture)2 + sigmatalon2. Si on trace la courbe de sigmacamera2 en fonction de G2 on trouve bien une droite. et donc le bruit de talon et de lecture (voir image 3) Le bruit de talon à 11° Celsius est de 1.2 et celui de lecture de 3.42 pour ESO1000D.
Gain ou sensibilité optimale :
Le meilleur gain de l'appareil est celui tel que le bruit fixe devient juste négligeable en regard du bruit de lecture. Si le gain dépasse trop cette valeur, la dynamique vraie est détériorée (dynamique vraie = rapport entre le signal maximal enregistrable et le bruit caméra) Dans ce cadre le gain optimum (dans le vert est 0,5). Cela donne une sensibilité optimale de 800 ISO :(G*sigmalecture)2 = 2 fois sigmatalon2.
rapport signal sur bruit:
Selon la formule G= sigmasignal/(signalfond-signaldark) , le bruit propre du signal est G*S ou S est le signal réél en ADU. A ce bruit il faut rajouter quadratiquement le bruit le lecture et le bruit talon.
Le bruit total est alors
(G*S+ (G*sigmalecture)2 + sigmatalon2)1/2
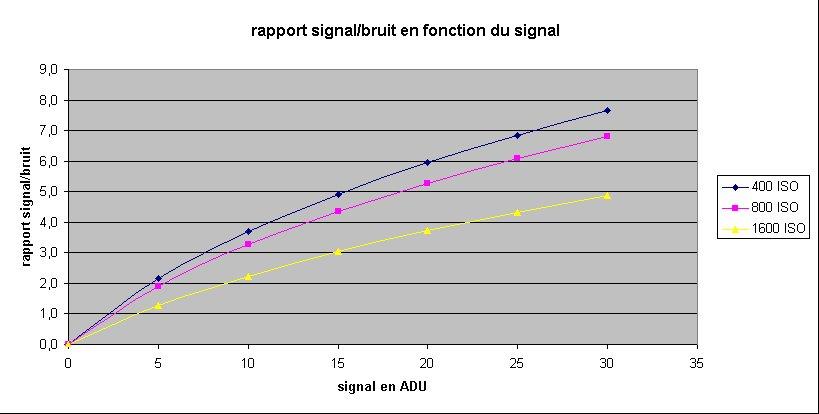
le rapport signal sur bruit est alors S/ (G*S+ (G*sigmalecture)2 + sigmatalon2)1/2
Sur les petits signaux (c'est ce qui nous interresse en astrophoto du fond du ciel) le résultat rapport signal sur bruit sur une pose en fonction du signal est donnée sur l'image 4.